Project: Design mechanism to control robotic arm by Zynq board
Posted: Sat Feb 25, 2017 12:42 pm
Wakuu, I am planning to try this project. Whenever I get time, I ll try to do it.
The idea: In robotics, radar, Tanks, controllers, etc., there is the so called the arm that can rotate left, right, up and down depending on the purpose. Also in various systems we may have simple to complex motors to control something. But ask yourself, what makes these motors do their job? Only power? How about processors to control them? What tells the arm to rotate 36 degree left, right, hold?
So, software (C, C++, Java, Linux, HDL) and hardware (Zynq board, motor, Sensors, Pmod ) can be integrated to come up with a system that can do the job via processors. Thus, this project will involve integration of software and hardware to do the job.
What is required?
-Zynq board( Expensive of course)
-Motor (few voltages for small scale project)
-Vivado HLS software
-Xilinx SDK tool
-Pmod connectors
-Sensors (obstacle detection)
Where to start?
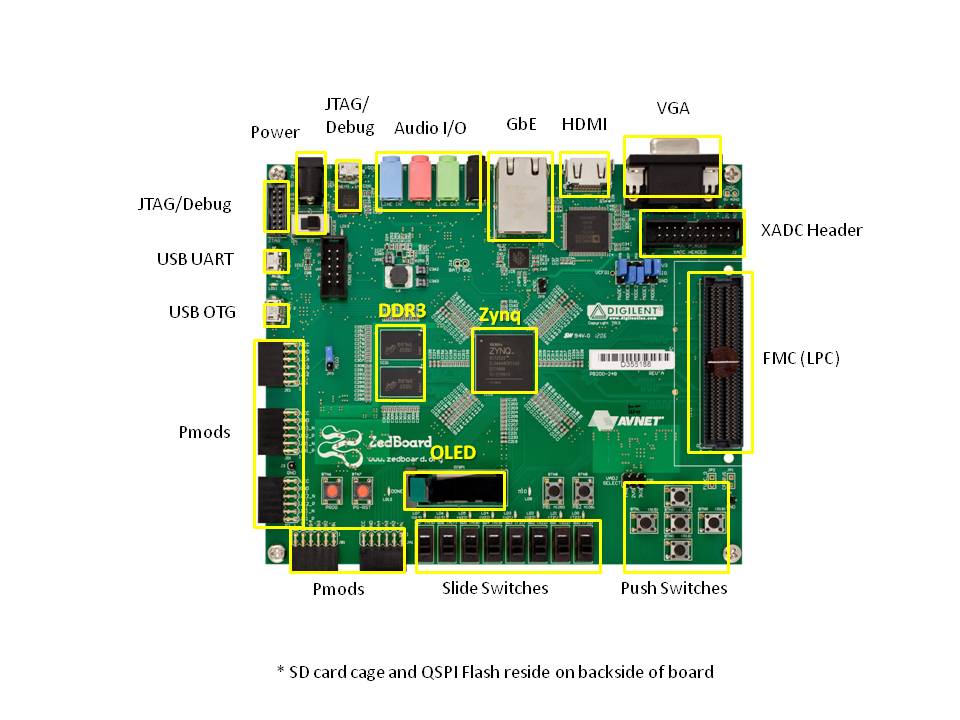
-First, we need to be familiar with Zynq board, its connections, ARM, FPGA and all the interfaces.
-Learn on how to configure the board in PC
I may start with integrating "Hello World" in C into the hardware.
All materials are here http://zedboard.org, https://embeddedcentric.com and the procedures are in the PDF below plus a lot of materials are on the internet.

The idea: In robotics, radar, Tanks, controllers, etc., there is the so called the arm that can rotate left, right, up and down depending on the purpose. Also in various systems we may have simple to complex motors to control something. But ask yourself, what makes these motors do their job? Only power? How about processors to control them? What tells the arm to rotate 36 degree left, right, hold?
So, software (C, C++, Java, Linux, HDL) and hardware (Zynq board, motor, Sensors, Pmod ) can be integrated to come up with a system that can do the job via processors. Thus, this project will involve integration of software and hardware to do the job.
What is required?
-Zynq board( Expensive of course)
-Motor (few voltages for small scale project)
-Vivado HLS software
-Xilinx SDK tool
-Pmod connectors
-Sensors (obstacle detection)
Where to start?
-First, we need to be familiar with Zynq board, its connections, ARM, FPGA and all the interfaces.
-Learn on how to configure the board in PC
I may start with integrating "Hello World" in C into the hardware.
All materials are here http://zedboard.org, https://embeddedcentric.com and the procedures are in the PDF below plus a lot of materials are on the internet.